









Overview
YARI V6X is an FMUv6X Pixhawk-compatible modular flight controller and autopilot platform designed for industrial UAVs, commercial drones, robotics platforms, high-vibration airframes, ArduPilot and PX4 Autopilot firmware development, and custom autonomous systems integrations.
The Standard Set includes the YARI V6X Flight Controller Module and YARI Pixhawk Autopilot Bus Carrier, giving developers and system integrators a rugged autopilot platform for ArduPilot and PX4-based systems.
Built with isolated sensor domains, triple IMUs, active thermal stabilization, and a rugged enclosure system, YARI V6X is designed for reliable navigation, stable state estimation, and long-term field use.
Key Features
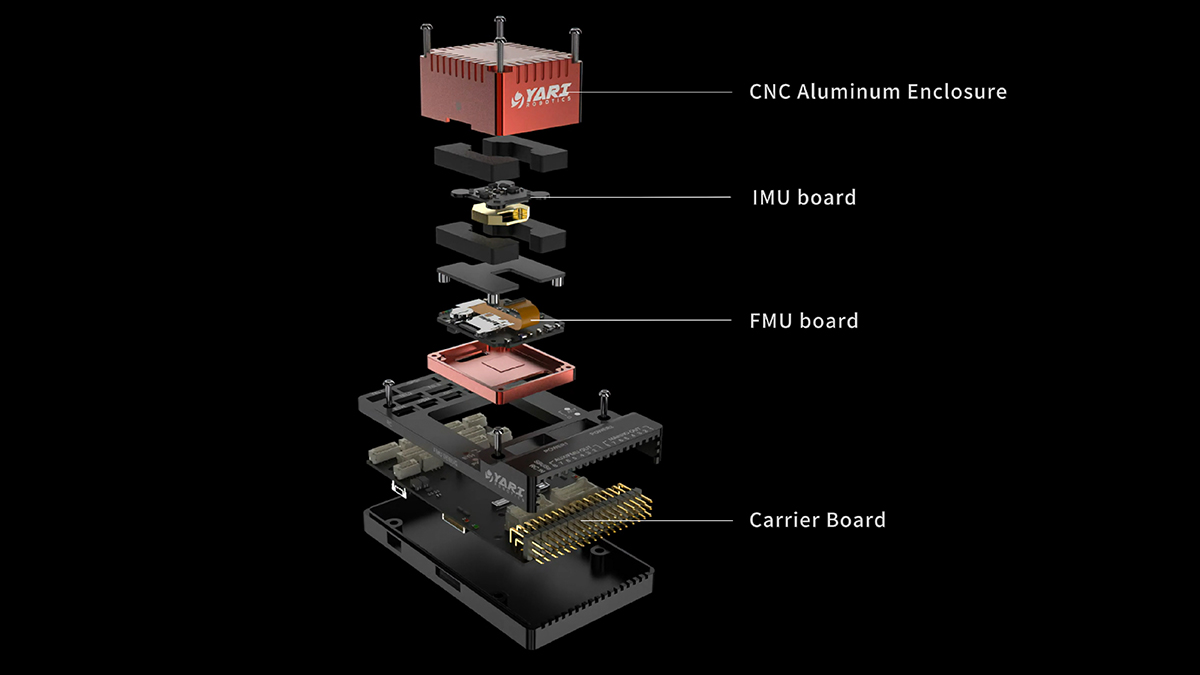
- Modular architecture: Discrete IMU, FMU, and base boards connected through the Pixhawk Autopilot Bus (PAB) for clean routing, easier serviceability, and future expansion.
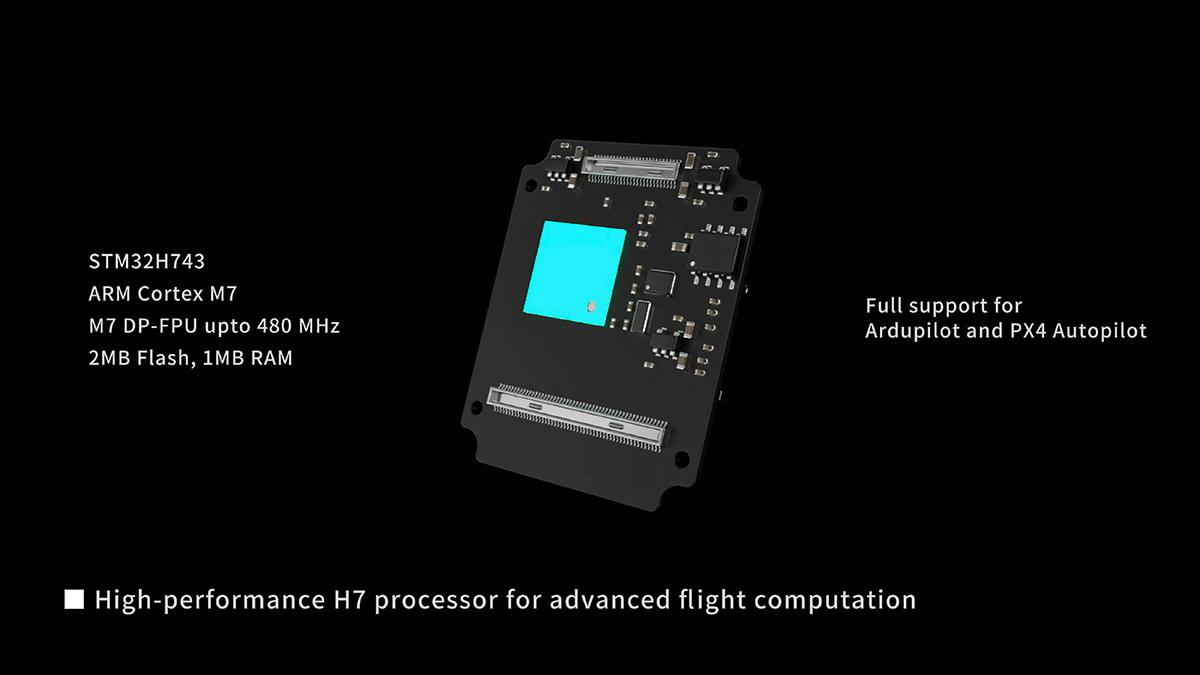
- High-performance MCU: STM32H743 running up to 480 MHz for fast control loops and advanced onboard applications.
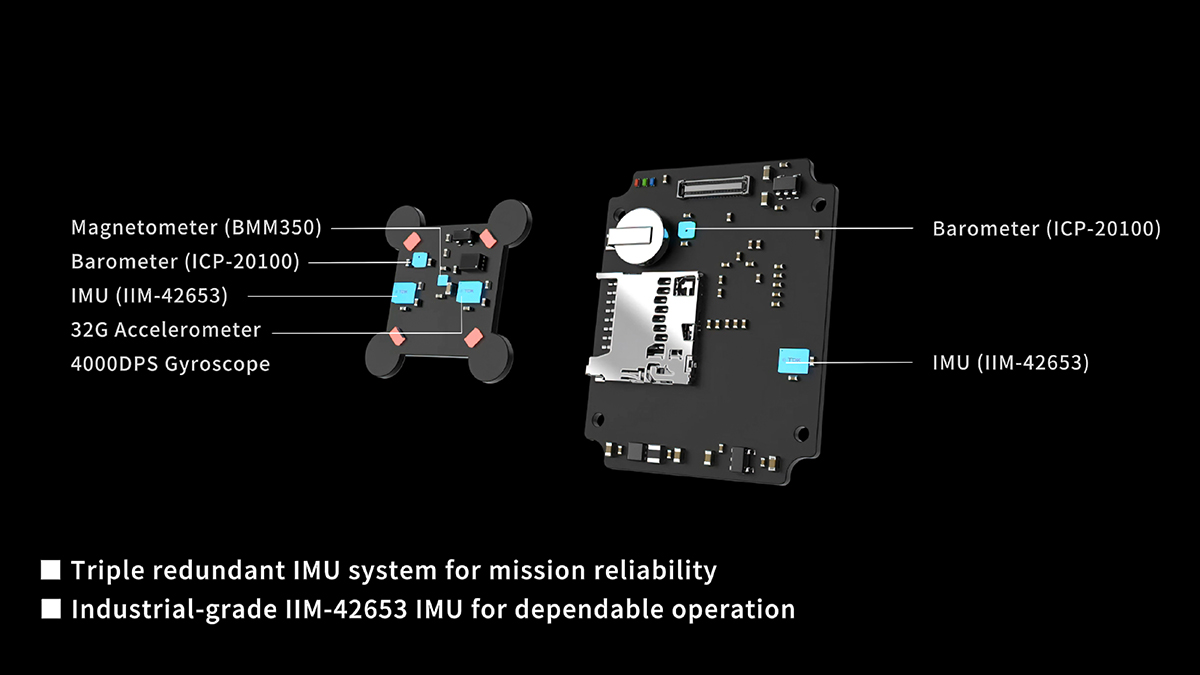
- Triple IMU array: Three synchronized IMUs, with REV-0 using ICM-45686 sensors and REV-1 using IIM-42653 sensors.
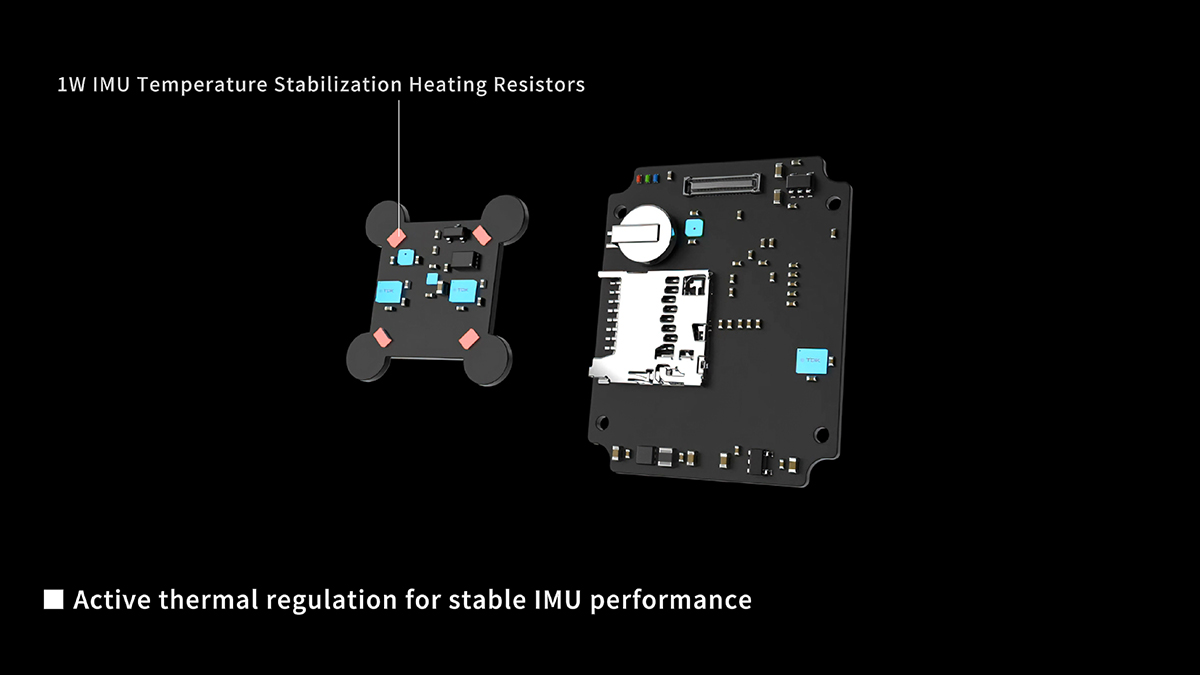
- Thermally stabilized sensors: Active IMU heating helps maintain consistent sensor performance across changing environmental conditions.
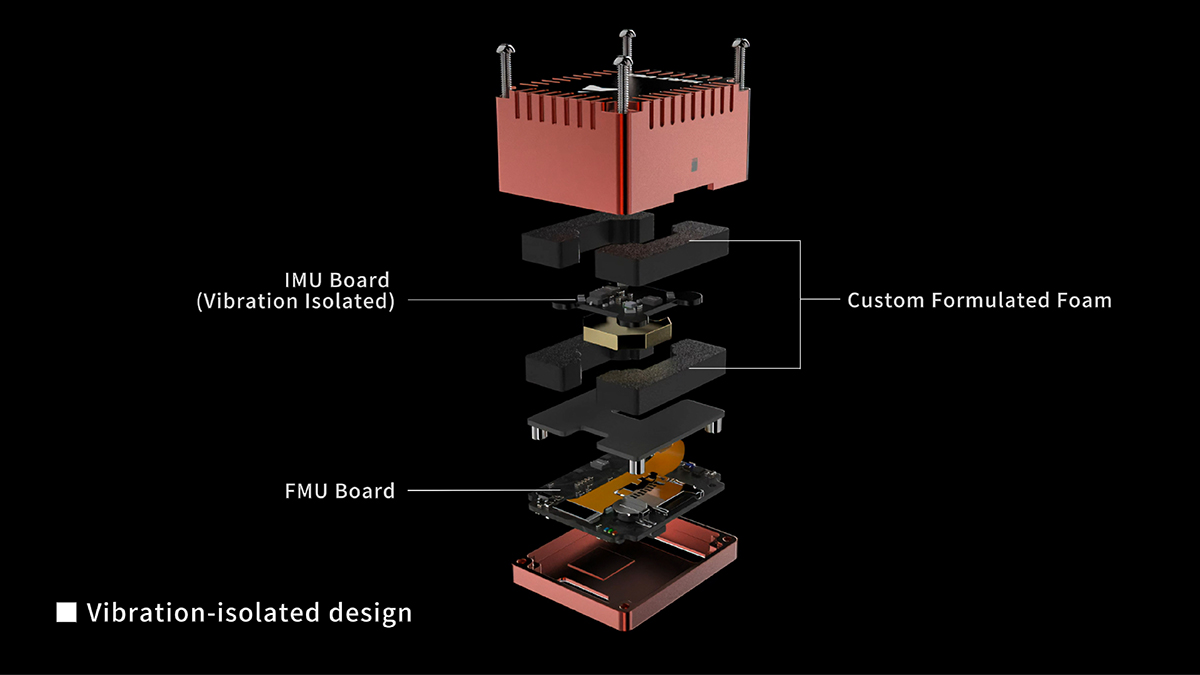
- Vibration isolation: Custom-formulated damping material helps preserve IMU accuracy on high-vibration airframes.
- Redundant architecture: Isolated sensor domains with dedicated buses and independent power control improve fault containment.
- Rugged enclosure system: Flight controller modules use CNC-machined aluminum enclosures, while the carrier board uses an SLA 3D printed enclosure.
- Firmware support: Ships with ArduPilot and can be flashed with PX4 using Mission Planner or QGroundControl.
Package Includes
- YARI V6X Flight Controller Module
- YARI Pixhawk Autopilot Bus Carrier
- Cable set
- 32 GB microSD card
Specifications
| Firmware Compatibility | |
|---|---|
| Supported firmware | ArduPilot ships by default; PX4 can be flashed using Mission Planner or QGroundControl |
| Sensors | |
| IMUs | 3x IMUs; REV-0 uses ICM-45686, REV-1 uses IIM-42653 |
| Barometer | InvenSense ICP-20100 |
| Magnetometer | Bosch BMM350 |
| IMU heater | 1 W active heater |
| Processing and Storage | |
| Processor | STM32H743IIK6 MCU, up to 480 MHz |
| Flash | 2 MB |
| RAM | 1 MB |
| FRAM | 256 KB |
| Storage | microSD slot; includes 32 GB microSD card |
| Electrical and Environmental | |
| Voltage rating | 5 V |
| Current rating | 500 mA total: 300 mA system, 200 mA heater |
| Lab tested temperature range | -20 C to +80 C |
| Mechanical | |
| Dimensions | 93.7 x 54 x 26.9 mm |
| Weight | 81 g |
| Enclosure | Flight controller modules: CNC-machined aluminum; carrier board: SLA 3D printed enclosure |
| Other | |
| Country of origin | India |



